

The autonomous capabilities of vehicles are at a turning point. Consumers have embraced basic autonomous features such as adaptive cruise control and blindspot warning and anticipate future features will meet both the safety levels and convenience they have come to expect.
Automakers are engineering and testing precision and location-based technology to not only meet customer expectations, but exceed them.
Autonomous and semi-autonomous vehicles that will dominate the world’s highways and byways of tomorrow will need to know their position much better than today’s navigation systems. They will use more comprehensive and precise positioning systems, telling the vehicle not only where it is on the map but exactly where it is in a lane.
The key to autonomous functionality lies within the vehicles’ sensor suite. This suite is comprised of a combination (determined by the vehicle manufacturers) of radar, camera, lidar, inertial and GNSS (Global Navigation Satellite System, of which GPS is a part), with GNSS being the only sensor to provide absolute position, velocity and time. Below are five specific ways that GNSS is enabling safe and accurate autonomous driving:
1. Precise Positioning Delivers Integrity
Integrity, in the context of autonomous navigation, is the trust in the data that a positioning system provides. High levels of integrity are one of the keys to implementing safety-of-life automotive applications. Sensors, regardless of their performance, are only as good as when the system knows to trust their output. Providing protection levels and alert limits at a Targeted Integrity Risk (TIR) enables Advanced Driver Assistance Systems (ADAS) to have the confidence required in the position and velocity output provided by the system.
2. Precise Positioning Provides Absoluteness
One key benefit brought by precise positioning to the autonomous vehicle sensor suite is absolute positioning. As autonomous and Cellular Vehicle to Everything (CV2X) features evolve and expand, the need for a common reference frame for positioning becomes increasingly vital. By providing positioning in an Earth fixed datum, a common frame of reference can be used with precision maps and other vehicles without the requirement of constant update to High Definition maps.
3. Precise Positioning Enhances Localization
Localization is knowing precisely where you are on Earth – your latitude, longitude and altitude. As it relates to autonomous vehicles, localization is key to making certain a vehicle is also where it is supposed to be. Precise positioning makes localization more accurate, thereby improving the vehicle’s capability to operate safely and accurately within the landscape of its local environment.
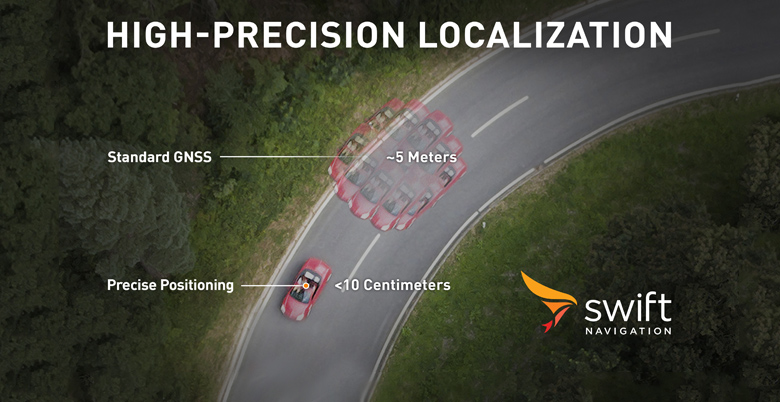 Precise positioning enables a vehicle to know whether it is on a major highway or an adjacent access road or whether the vehicle is on street level or at an altitude of 40 ft. (12 m) above street level on an overpass.
Precise positioning enables a vehicle to know whether it is on a major highway or an adjacent access road or whether the vehicle is on street level or at an altitude of 40 ft. (12 m) above street level on an overpass.
The vehicle must adapt when faced with ambiguity, such as for highway ramp merging or to navigate accurately when visibility is poor as in snow or inclement weather conditions when it is difficult to discern the correct path at a crosswalk or intersection.
To be safe and navigate with accuracy, precise positioning enables a vehicle to maintain its position, not within 10 to 16 ft. (3 to 5 m), but within centimeters. By integrating precise positioning into the autonomous sensor suite, localization is possible at the degree of accuracy that today's autonomous vehicle manufacturers demand.
4. Precise Positioning Evolves for Automotive
Regardless of the number of satellite signals available, there are unavoidable factors, such as the atmosphere, that can impact a standard GNSS signal, resulting in position errors in the 9-, 16- and 33-ft. (3-, 5- or 10-m) range. Precise Positioning uses error corrections sent to the vehicle to account for and correct such interference and ensure accurate localization.
Just as autonomy is evolving, so too are GNSS corrections. Real-time kinematics (RTK) provide highly-accurate results but often leave vehicles tethered to a fixed base station or geographically restricted area and have little capability for fault detection.
This hinders applicability for mass-market automotive. Precise-point positioning (PPP) allows more geographic range but with less accuracy and with slow convergence times that do not meet the needs of automotive applications.
Today some companies are rethinking these methods and have combined the best of both approaches to create a high-performance hybrid of network RTK and PPP in the form of a cloud corrections service that delivers the accuracy and integrity autonomous vehicles require for safety without geographic limitations.
Such a cloud corrections network is supported by established and known base stations strategically positioned to create a reference infrastructure. This infrastructure provides the corrections service with critical data used to reduce errors and build accurate, real-time positioning.
5. Precise Positioning Quickens Convergence Times
The time it takes a vehicle from the first observation of the satellite signal until reporting the position is referred to as “convergence time.” With an infrastructure of base stations and a cloud corrections service delivering corrections to the vehicle, convergence time is reduced, delivering an accurate position in real-time.
The corrections are processed on the vehicle by positioning engine software that combines the satellite data and error correction data with the vehicle inertial sensors to generate a final position, velocity and time. The inertial sensor fusion enables the continual output of precise positioning when the satellite signal is interrupted, such as when driving under a bridge.
6. Precise Positioning Improves the Cost Equation for Autonomy
Historically, precise positioning came at a cost not affordable for one passenger vehicle, let alone millions of vehicles. The newest generation of corrections services are specifically designed for automotive use and are provided at an affordable cost.
In addition, the latest positioning engines are designed to work with the latest automotive GNSS receivers which are significantly less expensive than legacy receiver options. The combined cost of the corrections service and the positioning engine is a fraction of the cost of other ADAS sensors, making it the most affordable advanced sensor in an autonomous vehicle.
 Using precise positioning, an autonomous vehicle manufacturer can greatly enhance accuracy and safety at an affordable cost. As OEMs design autonomous vehicles at increasing levels of autonomy utilizing precise positioning, the once-futuristic view of a world transportation network with autonomous vehicles may be closer than we think.
Using precise positioning, an autonomous vehicle manufacturer can greatly enhance accuracy and safety at an affordable cost. As OEMs design autonomous vehicles at increasing levels of autonomy utilizing precise positioning, the once-futuristic view of a world transportation network with autonomous vehicles may be closer than we think.
Joel Gibson is executive vice president of Automotive at Swift Navigation and heads the company’s Detroit office. Joel is responsible for automotive strategy, enabling automated driving, precision navigation and other safety and ADAS applications.



